近期推出的跨感應器電壓調節器TLVR,在為低電壓、大電流負載(如 CPU、GPU 和 ASIC)供電的多相直流對直流(DC-to-DC)應用中大受歡迎。這一趨勢主要歸功於該技術卓越的瞬態響應效能。TLVR 同時提供了設計與佈局的靈活性,但它也存在若干缺點。本文將闡明 TLVR 的設計選擇如何影響效能參數,並討論相關的權衡取捨。

近期推出的跨感應器電壓調節器TLVR,在為低電壓、大電流負載(如 CPU、GPU 和 ASIC)供電的多相直流對直流(DC-to-DC)應用中大受歡迎。這一趨勢主要歸功於該技術卓越的瞬態響應效能。TLVR 同時提供了設計與佈局的靈活性,但它也存在若干缺點。本文將闡明 TLVR 的設計選擇如何影響效能參數,並討論相關的權衡取捨。

本文呈現了對一款尖端智慧振動感測器的深入探討,強調其設計、功能與應用,這一切均植根於微機電系統(MEMS)技術。該感測器的核心目標是在各種工業與研究環境中提供高精度、可靠性及即時監測能力,展現了 ADI 不同 MEMS 感測技術的應用。

透過單一電纜以高可靠性傳輸影像、控制訊號和電源,提供了一個極具前景的解決方案。本文探討了相機在機器人領域的部署方式、其面臨的連接挑戰,以及 GMSL 如何助力打造具備擴展性、穩健性且效能驅動的機器人平台。

隨著對智慧邊緣裝置的需求爆炸式增長,AI 正迅速向邊緣遷移,但許多開發者仍面臨難以將強大模型嵌入微型微控制器的困境。開發者面臨著陡峭的學習曲線,必須同時處理數據預處理、模型選擇、超參數調校以及硬體特定的優化。
5G 的到來預示著物聯網(IoT)時代的降臨。雖然末端使用者是以無線方式連接網路,但網路核心仍需穩定可靠的有線連接,因此光纖通訊是典型的互連方式。本文描述了如何使用 Maxim 的微控制器來設計光模組,這是光纖通訊中不可或缺的重要部分。



嵌入式工程師都清楚,在邊緣側設備上更新 AI 模型並非易事。通常情況下,工程師將神經網路直接燒錄到韌體中,寄望模型能長期穩定運行;而更新模型往往需要物理接觸設備,還得進行完整的重新編程。

在本文探討的所有產品中,將重點關注最近發布的用於 ADI Trinamic™ 馬達控制器的 ROS 驅動程式,該驅動程式是用於嵌入式運動控制的完整板級模組,融合 ADI Trinamic 運動控制專業知識,以及 ADI 的類比製程技術和電源設計技能。
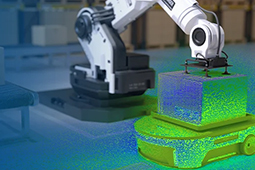
在真實物理世界中訓練機器人,不僅進展緩慢、成本高昂,而且難以規模化。機器人研究人員在開發 AI 策略 (Policies) 時,十分仰賴高品質資料,尤其是針對複雜任務,例如抓取柔性物體或在雜亂環境中自主移動。